00:00:00
图的拓扑排序和关键路径 原创
一、AOV网(Activity On Vertex Network)
1.1 定义
AOV 网是一种(DAG,Directed Acyclic Graph)用,用有向的。 它是一种用有向图来描述工程或系统各子任务(活动)之间优先关系的有力工具。
- 顶点(Vertex):表示一个活动(Activity)或子任务。例如:课程教学中的“先修课程”,产品生产中的“组装零件”。
- 有向边(Edge):表示活动之间的或。若存在有向边
<i, j>,则表示活动i必须完成后,活动j才能开始。此时称i是j的直接前驱,j是i的直接后继。
1.2 核心特性
- 有向性:边有方向,表示。
- 无环性:AOV网中。如果存在环,则意味着某项活动必须以自身的完成为先决条件,这在逻辑上是荒谬的,工程也无法进行。
1.3 拓扑排序(Topological Sort) - AOV网的核心算法
拓扑排序是解决AOV网问题的核心算法,其目的是将AOV网中的所有顶点排成一个线性序列,使得任何一对顶点 u 和 v,若 <u, v> 是网中的边(即 u 领先于 v),则在序列中 u 也必须排在 v 的前面。
1.3.1 拓扑排序的算法步骤(常考过程描述):
- 初始化:从AOV网中选择一个(即)的顶点并输出。
- 删除顶点及以其为尾的弧:从网中和所有(即将其直接后继顶点的入度减1)。
- 重复执行:重复上述两步,直到:
- 当前网中(说明图中还有未输出的顶点,但已找不到入度为0的点,意味着图中)。
- 或所有的顶点均已输出,得到一个拓扑序列。
- 拓扑排序示意图:对于图中
(a)所示的有向无环图进行拓扑排序,得到的拓扑序列为:6、1、4、3、2、5
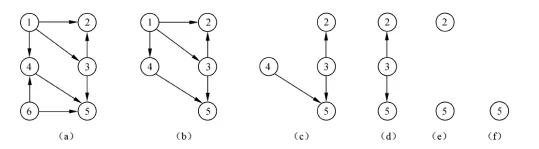
- 拓扑排序序列不唯一:拓扑排序的序列不唯一,存在多个入度为
0的顶点时,根据选择的不同可能会出现多个拓扑序列,例:示意图中可能得到的序列还有:1、6、4、3、2、5
二、AOE网 (Activity On Edge)
2.1 定义
AOE网(Activity On Edge Network),即边表示活动的网络。它是一种用于估算项目工期的带权有向无环图(DAG)。
- 顶点(Vertex):表示事件(Event),即某个时刻或状态,例如“某项活动开始”或“某项活动结束”。顶点不消耗时间。
- 有向边(Edge):表示活动(Activity),即一个子任务或工序。边有,表示完成该活动所需的。
- 源点与汇点:AOE网中,称为源点(Source),;,称为汇点(Sink),。
2.2 AOE网要研究的问题
- 完成整个工程至少需要多少时间?
- 哪些活动是影响工程进度的?如何找到它们?
2.3 关键路径(Critical Path)法
关键路径法是求解AOE网问题的核心算法。关键路径是从源点到汇点的(不是最短路径!),其长度决定了整个工程的最短工期。路径上的活动称为关键活动。
2.3.1 关键路径算法的核心参数
为了找到关键路径,需要为每个事件(顶点)和每个活动(边)定义4个关键参数:
| 符号 | 名称 | 定义 |
|---|---|---|
| ve(j) | 事件最早发生时间 | 从源点到顶点 j 的最长路径长度。决定了以该事件为始点的活动的最早开始时间。 |
| vl(j) | 事件最晚发生时间 | 在不拖延整个工期的前提下,该事件最迟必须发生的时间。 |
| e(i) | 活动最早开始时间 | 该活动弧尾事件(起点) 的最早发生时间,即 e(i) = ve(j)。 |
| l(i) | 活动最晚开始时间 | 该活动弧头事件(终点) 的最晚发生时间减去活动持续时间,即 l(i) = vl(k) - dut(<j,k>)。 |
| l(i)-e(i) | 活动时间余量 | 该活动可以拖延的时间。如果时间余量为0,则该活动为关键活动。 |
2.3.2 算法步骤(非常重要!)
正向计算事件最早发生时间
ve(j)(从源点走向汇点)ve(源点) = 0ve(j) = Max{ ve(i) + dut(<i, j>) }(i是j的所有前驱顶点)- 计算顺序:按拓扑排序的顺序推进。
反向计算事件最晚发生时间
vl(i)(从汇点倒推向源点)vl(汇点) = ve(汇点)vl(i) = Min{ vl(j) - dut(<i, j>) }(j是i的所有后继顶点)- 计算顺序:按逆拓扑排序的顺序推进。
计算活动的最早/最晚开始时间
e(k)和l(k)- 设活动
k用边<i, j>表示,其持续时间为dut。 e(k) = ve(i)(活动最早开始时间 = 其起点事件的最早时间)l(k) = vl(j) - dut(活动最晚开始时间 = 其终点事件的最晚时间 - 活动耗时)
- 设活动
确定关键活动和关键路径
- 找出所有
l(k) == e(k)的活动,这些就是关键活动。 - 由关键活动首尾连接形成的从源点到汇点的路径,就是关键路径。
- 找出所有
2.3.3 经典示例与手工计算(软考大题形式)
假设有一个AOE网,其结构如下所示。我们将一步步计算其关键路径。
AOE网结构(活动及其持续时间): 顶点1为源点,顶点9为汇点。
计算事件最早发生时间 ve(j)
从源点(事件 1)开始,按照拓扑顺序计算:
- ve(1) = 0
- ve(2) = ve(1) + 6 = 6
- ve(3) = ve(1) + 4 = 4
- ve(4) = ve(1) + 5 = 5
- ve(5) = max{ve(2)+1, ve(3)+1} = max{7, 5} = 7
- ve(6) = ve(4) + 2 = 7
- ve(7) = ve(5) + 9 = 16
- ve(8) = max{ve(5)+7, ve(6)+4} = max{14, 11} = 14
- ve(9) = max{ve(7)+2, ve(8)+4} = max{18, 18} = 18
计算事件最晚发生时间 vl(j)
从汇点(事件 9)开始,按照逆拓扑顺序计算:
- vl(9) = ve(9) = 18
- vl(8) = vl(9) - 4 = 14
- vl(7) = vl(9) - 2 = 16
- vl(6) = vl(8) - 4 = 10
- vl(5) = min{vl(7)-9, vl(8)-7} = min{7, 7} = 7
- vl(4) = vl(6) - 2 = 8
- vl(3) = vl(5) - 1 = 6
- vl(2) = vl(5) - 1 = 6
- vl(1) = min{vl(2)-6, vl(3)-4, vl(4)-5} = min{0, 2, 3} = 0
计算活动的最早开始时间 e(i) 和最晚开始时间 l(i)
对于每个活动,计算其时间余量(l(i) - e(i)):
- a1: e = ve(1) = 0, l = vl(2)-6 = 0, 余量 = 0
- a2: e = ve(1) = 0, l = vl(3)-4 = 2, 余量 = 2
- a3: e = ve(1) = 0, l = vl(4)-5 = 3, 余量 = 3
- a4: e = ve(2) = 6, l = vl(5)-1 = 6, 余量 = 0
- a5: e = ve(3) = 4, l = vl(5)-1 = 6, 余量 = 2
- a6: e = ve(4) = 5, l = vl(6)-2 = 8, 余量 = 3
- a7: e = ve(5) = 7, l = vl(7)-9 = 7, 余量 = 0
- a8: e = ve(5) = 7, l = vl(8)-7 = 7, 余量 = 0
- a9: e = ve(6) = 7, l = vl(8)-4 = 10, 余量 = 3
- a10: e = ve(7) = 16, l = vl(9)-2 = 16, 余量 = 0
- a11: e = ve(8) = 14, l = vl(9)-4 = 14, 余量 = 0
计算过程用表格表示:
| 事件 | ve (最早) | vl (最晚) | 活动 | e (最早) | l (最晚) | l - e | 关键活动 |
|---|---|---|---|---|---|---|---|
| 1 | 0 | 0 | a1 | 0 | 0 | 0 | Yes |
| 2 | 6 | 6 | a2 | 0 | 2 | 2 | |
| 3 | 4 | 6 | a3 | 0 | 3 | 3 | |
| 4 | 5 | 8 | a4 | 6 | 6 | 0 | Yes |
| 5 | 7 | 7 | a5 | 4 | 6 | 2 | |
| 6 | 7 | 10 | a6 | 5 | 8 | 3 | |
| 7 | 16 | 16 | a7 | 7 | 7 | 0 | Yes |
| 8 | 14 | 14 | a8 | 7 | 7 | 0 | Yes |
| 9 | 18 | 18 | a9 | 7 | 10 | 3 | |
| a10 | 16 | 16 | 0 | Yes | |||
| a11 | 14 | 14 | 0 | Yes |
确定关键活动和关键路径
时间余量为 0 的活动是关键活动:a1, a4, a7, a8, a10, a11
关键路径有两条:
- 1 → 2 → 5 → 7 → 9 (a1 → a4 → a7 → a10)
- 1 → 2 → 5 → 8 → 9 (a1 → a4 → a8 → a11)
总工期为 18 个单位时间。
总工期
总工期由从(顶点1)(顶点9)的(即)的决定。
三、AOE网 vs. AOV网(对比记忆)
| 特性 | AOV网 (Activity On Vertex) | AOE网 (Activity On Edge) |
|---|---|---|
| 顶点表示 | 活动 | 事件(状态、时刻) |
| 边表示 | 优先关系(无权) | 活动(有权,表时间) |
| 关注点 | 活动的先后顺序(拓扑排序) | 工程的最短工期(关键路径) |
| 核心算法 | 拓扑排序 | 关键路径法(CPM) |
| 应用 | 课程先修关系、任务调度依赖 | 项目工期估算、关键任务识别 |
四、最短路径
在(或称)中,寻找两个顶点之间的那条路径,就是。
- 路径长度:路径上所有边的权值之和。
- 最短路径:所有可能路径中长度的那一条(注意:不是边数最少,而是)。
- 源点(Source):路径的起始顶点。
- 终点(Destination):路径的结束顶点。
根据问题范围,分为两类:
- 单源最短路径:求从一个到图中的最短路径。
- 多源最短路径:求图中之间的最短路径。
4.1 单源最短路径
单源最短路径主要采用,是典型的策略
4.1.1 算法特点与使用场景
- 使用场景:等所有需要求。
- 前提要求:图中(>=0)。这是该算法能正确工作的前提。
- 算法思想:设置一个顶点集合 ,存放。每次从剩余顶点中选择一个离源点最近的顶点加入 ,并松弛其邻接边, 。
4.1.2 示例图与分步解题
我们以下面的带权有向图为例,求从源点 A 到其他各顶点的最短路径。
邻接矩阵
算法步骤(使用三个数组:S, dist, path):
初始化:
S[](已确定集合):{A}dist[](最短距离):dist[A] = 0dist[B] = 10(A→B)dist[C] = 5(A→C)dist[D] = ∞(暂无路径)
path[](前驱顶点):path[B] = Apath[C] = Apath[D] = -(未知)
顶点 dist path S A 0 - ✅ B 10 A C 5 A D ∞ - 第一轮迭代:
- 从
V-S(B, C, D) 中选出dist最小的顶点C(dist[C]=5)。 - 将
C加入S。 - 松弛操作:检查
C的所有邻接点 (B,D)。- 对于
B:dist[C] + weight(C,B) = 5 + 3 = 8。8 < 10(当前dist[B]),所以dist[B] = 8,path[B] = C。 - 对于
D:dist[C] + weight(C,D) = 5 + 9 = 14。14 < ∞,所以dist[D] = 14,path[D] = C。
- 对于
顶点 dist path S A 0 - ✅ B 8 C C 5 A ✅ D 14 C - 从
第二轮迭代:
- 从
V-S(B, D) 中选出dist最小的顶点B(dist[B]=8)。 - 将
B加入S。 - 松弛操作:检查
B的所有邻接点 (D)。- 对于
D:dist[B] + weight(B,D) = 8 + 1 = 9。9 < 14(当前dist[D]),所以dist[D] = 9,path[D] = B。
- 对于
顶点 dist path S A 0 - ✅ B 8 C ✅ C 5 A ✅ D 9 B - 从
第三轮迭代:
- 将最后一个顶点
D加入S。无需松弛操作。
顶点 dist path S A 0 - ✅ B 8 C ✅ C 5 A ✅ D 9 B ✅ - 将最后一个顶点
最终结果:
A->B:A->C->B,长度 8A->C:A->C,长度 5A->D:A->C->B->D,长度 9
路径还原技巧:从终点
D的path[D]=B开始,找B的前驱path[B]=C,再找C的前驱path[C]=A,反向得到路径A->C->B->D。
4.2 多源最短路径
一般采用,是典型的的策略。
4.2.1 算法特点与使用场景
- 使用场景:需要计算的场景,如计算。
- 前提要求:可以处理,但的图(因为负权回路可以无限绕行,使路径长度无限小)。
- 算法思想:对于任意两点
(i, j),考虑所有其他顶点k作为中间点,检查是否存在一条经过k的路径比已知路径更短。
4.2.2 示例图与分步解题
我们使用一个更简单的图来演示 算法的矩阵迭代过程。
算法步骤(使用距离矩阵 D):
初始化距离矩阵 (即邻接矩阵):
A B C A 0 4 11 B 6 0 2 C 3 ∞ 0 第一轮迭代 (,允许借助顶点 中转):
- 检查所有
i->j,看i->A->j是否更短。 D[B][C]:min( D[B][C]=2, D[B][A]+D[A][C]=6+11=17 )-> 2D[C][B]:min( D[C][B]=∞, D[C][A]+D[A][B]=3+4=7 )-> 7
A B C A 0 4 11 B 6 0 2 C 3 7 0 - 检查所有
第二轮迭代 (,允许借助顶点 , 中转):
- 检查所有
i->j,看i->B->j是否更短。 D[A][C]:min( D[A][C]=11, D[A][B]+D[B][C]=4+2=6 )-> 6D[C][A]:min( D[C][A]=3, D[C][B]+D[B][A]=7+6=13 )-> 3
A B C A 0 4 6 B 6 0 2 C 3 7 0 - 检查所有
第三轮迭代 (,允许借助顶点 , , 中转):
- 检查所有
i->j,看i->C->j是否更短。 D[B][A]:min( D[B][A]=6, D[B][C]+D[C][A]=2+3=5 )-> 5D[A][B]:min( D[A][B]=4, D[A][C]+D[C][B]=6+7=13 )-> 4
最终距离矩阵 :
A B C A 0 4 6 B 5 0 2 C 3 7 0 - 检查所有
结论:从上表可知:
A到C的最短路径长度为6(路径:A->B->C)B到A的最短路径长度为5(路径:B->C->A)C到B的最短路径长度为7(路径:C->A->B)
4.3 总结与对比
| 特性 | Dijkstra (迪杰斯特拉) | Floyd (弗洛伊德) |
|---|---|---|
| 解决问题 | 单源最短路径 | 多源最短路径(任意两点) |
| 算法思想 | 贪心算法 | 动态规划 |
| 图的要求 | 边权值非负 | 可处理负权边,不能有负权回路 |
| 时间复杂度 | ||
| 空间复杂度 | ||
| 常见考查形式 | 手工模拟计算过程,填写 dist[] 和 path[] 数组 | 手工模拟矩阵迭代过程,填写距离矩阵 D[][] |
应试技巧与常见陷阱:
- 算法。这是最常考的陷阱!
- 在手工模拟 Dijkstra 算法时,一旦一个顶点被加入集合 ,。
- Floyd 算法的(中间点
k从 0 到 n-1),每次更新整个矩阵。 - 下午大题中,很可能会给一个简单的图,让你手工执行一遍两种算法的步骤,并写出结果。务必清晰展示每一步的中间结果。