00:00:00
图 原创
图是比树结构更复杂的一种数据结构,表示。 在线性结构中,除首结点没有前驱、末尾结点没有后继外,一个结点只有唯一的一个直接前驱和唯一的一个直接后继。 在树结构中,除根结点没有前驱结点外,其余的每个结点只有唯一的一个前驱(双亲)结点和多个后继(子树)结点。 在图中,之间,所以图中一个结点的是。
一、图的定义与存储
1.1 图的定义
图 G 是由集合 V 和 E 构成的二元组, 记作 , 其中, V 是图中顶点的非空有限集合, E 是图中边的有限集合。从数据结构的逻辑关系角度来看,图中任一顶点都有可能与其他顶点 有关系,而图中有关系。在图中,表示,数据表示。
1.1.1 重要概念
- 顶点(Vertex):图中的,也称为"节点"。
- 边(Edge):图中顶点之间的。边。
- 无向图(Undirected Graph):。若顶点
V1到V2有一条边,则可以从V1到V2,也可以从V2到V1。边用(V1, V2)表示。- 度(Degree):与顶点相关联的边的数量。
- 边无箭头,仅表示 “关联关系”,无方向属性;
- 无向图的邻接矩阵(若 ,则 )
- 有向图(Directed Graph / Digraph):。从
V1指向V2的边(箭头),只能从V1到V2,。边用<V1, V2>表示。- 入度(In-degree):与顶点相关联的边的数量。
- 出度(Out-degree):从该顶点指出的边的数量。
- 有向图的。
- 边的方向决定 “路径的单向性”。
- 权(Weight):边可以,用来表示信息。带权的图称为。
- 完全图:任意两个顶点之间都存在一条边的图。
- 无向完全图:有
n个顶点的无向完全图,其边的总数为 。 - 有向完全图:有
n个顶点的有向完全图,其边的总数为 (因为每个顶点都向其他所有顶点发出边,且是双向的)。 - 完全图是的图结构。
- 示意图:
- 无向完全图:有
- 连通图与连通分量:在
G中,如果从顶点v到顶点w,则称v和w是连通的。如果,则称图G。- 连通分量:无向图中的,要求该(再加入任何其他顶点或边都会破坏它的连通性),一个无向图,但它。连通分量可以看作是图的一个“连通部分”。
- 示意图:
- 强连通图与强连通分量:,在有向图 中,如果对于每一对顶点 , 且(),从 到 和从 到 都存在路径,则称 是强连通图。
- 强连通图:。
- 强连通分量:有向图中的,一个,但它可以包含一个或多个强连通分量。求解有向图的强连通分量是图算法中的一个重要问题(常用 Kosaraju 或 Tarjan 算法)。
- 示意图:
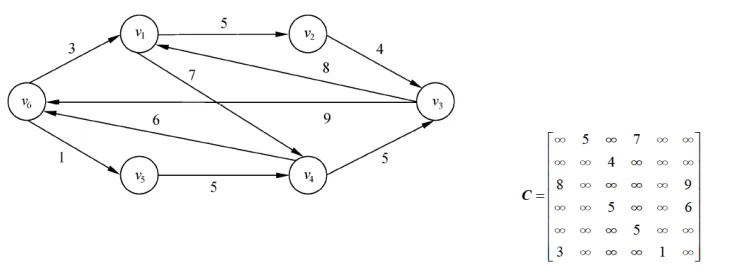
- 网:的图称为网。
- 图中的(权值,Weight)。这个权值,如距离、时间、费用、容量等。
- 在邻接矩阵中, 存储的不再是
1,而是权值 ;用(如 )或 表示。在邻接表中,需要。 - 示意图:
- 有向树:如果一个有向图恰有一个顶点的,,且从根到每个其他顶点,则是一棵有向树。
- 有向树是,是我们熟悉的树(如二叉树、多叉树)的更一般化定义。所有的边都从父节点指向子节点。
- 示意图:
1.2 注意事项
- 从图的逻辑结构的定义来看,图中的(即)。
- ;
- 的之间也。为了。
1.3 图的存储结构
图的基本存储结构有表示法和表示法两种。
1.3.1 邻接矩阵
图的邻接矩阵表示法是指用一个矩阵来表示图中顶点之间的关系。对于具有 个顶点的图 ,其邻接矩阵是一个 阶方阵,且满足:
由邻接矩阵的定义可知,,的邻接矩阵则。借助于邻接矩阵容易判定任意两个顶点之间是否有边(或弧)相连,并且容易求得各个顶 点的度。 对于,顶点 的度是邻接矩阵第 行(或列)中值不为 的元素个数;对于,第 ,第 是顶点 。
的邻接矩阵可定义为: 其中 ,是边(弧)上的权值。- 示例图:
有向图和无相图的邻接矩阵
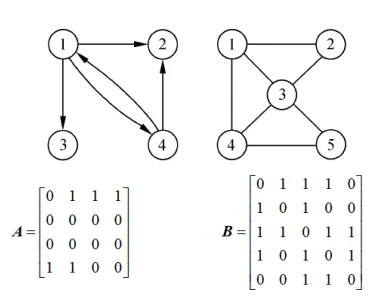
网的邻接矩阵
1.3.2 邻接链表
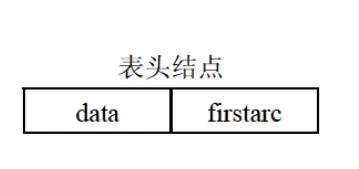
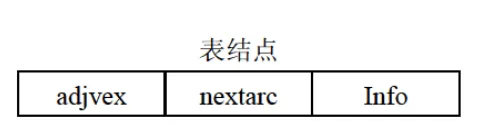
邻接链表表示法是指为图的每一个定点构造一个单链表,第 个单链表中的结点表示依附 于顶点 的边。邻接链表中的结点有表结点(或边结点)和表头结点两种类型,如下图所示
顶点表:
边表:
基本结构组件
| 组件 | 作用 | 存储内容 |
|---|---|---|
| 顶点表 | 存储所有顶点信息,每个顶点对应一个“顶点节点”,作为边表的入口 | - 顶点数据(如顶点编号、名称) - 指针(指向该顶点的第一条边的边表节点) |
| 边表 | 存储某顶点的所有邻接顶点,每个邻接关系对应一个“边表节点” | - 邻接顶点的索引(指向顶点表中对应顶点) - 指针(指向该顶点的下一条边) - (网的场景)额外存储边的权值 |
- 字段含义如下:
- 顶点表(表头):
- data: 存储顶点 的名或其他有关信息。
- firstarc:指示链表中的第一个结点(邻接顶点)。
- 边表:
- adjvex:指示与顶点,邻接的顶点 的序号。
- nextarc: 指示下一条边或弧的结点。
- info:存储与边或弧有关的信息,如权值等。
- 顶点表(表头):
1.3.2.1 软考常考的结构示意图(C语言风格,考试不考代码但需理解结构)
1.3.2.2 无向图与有向图的邻接表表示(软考核心差异)
邻接表的关键区别在于无向图和有向图的边表存储逻辑,这是软考高频考点(如判断度、统计边数)。
- 无向图的邻接表 无向图中,边
(u, v)是双向的,因此会在 u 的边表 和 v 的边表 中各存储一次(即一条无向边对应两个边表节点)。
示例图与邻接表:
无向图 ,,
软考考点:无向图的度计算
。
例:顶点2的边表有3个节点(adjvex=0、1、3),故度为3。
- 有向图的邻接表
有向图中,边<u, v>是单向的(u→v),因此仅在 u 的边表 中存储(即一条有向边对应一个边表节点),此时的邻接表也称为“出边表”(存储出边)。
有向图中,存储入度的邻接表边<u, v>存储在v的边表中,记录u是v的前驱叫逆邻接表, 邻接表和逆邻接表如下图所示:
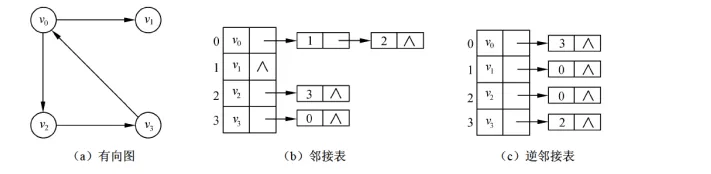
示例图与邻接表:
有向图 ,,
软考高频考点:有向图的度计算
- 出度 = 顶点边表的节点总数(直接统计出边数);
- 入度 = 所有边表中“adjvex等于该顶点索引”的节点总数(需遍历整个邻接表)。
例:顶点1的出度=1(边1→2),入度=2(边0→1、3→1)。
1.3.2.3 软考邻接表核心考点与注意事项
邻接表的空间复杂度为 ,其中
n是顶点数,e是边数。- 对比邻接矩阵():邻接表更适合 稀疏图(e ≪ n²),如社交网络、路由拓扑图;
- 软考真题:
“某稀疏图(n=1000,e=100)适合用哪种结构存储?”
答案: 邻接表(邻接矩阵需10⁶空间,邻接表仅需1100左右)。
操作效率对比(与邻接矩阵)
| 操作 | 邻接表(稀疏图) | 邻接矩阵(稠密图) | 软考结论 |
|---|---|---|---|
| 存储顶点数n、边数e | 稀疏图选邻接表,稠密图选矩阵 | ||
| 查找顶点u的所有邻接顶点 | 邻接表更高效 | ||
| 判断u和v是否有边 | 邻接矩阵更高效 | ||
| 遍历所有边(DFS/BFS) | 邻接表更适合遍历 |
网(带权图)的邻接表(软考重点):网的邻接表与普通图的区别:边表节点需额外存储 “权值”。
软考记忆要点
邻接矩阵:
- 空间:
- 查边:
- 找邻接点:
邻接表:
- 空间:
- 查边:
- 找邻接点:
关键区别:
- 矩阵适合稠密图和频繁查边
- 链表适合稀疏图和频繁遍历
1.3.2.4 真题
- 真题1(2023年软件设计师)
某有向图的邻接表如下,顶点0的边表有3个节点(adjvex=1、2、3),顶点1的边表有1个节点(adjvex=2),顶点2的边表为空,顶点3的边表有1个节点(adjvex=1)。以下说法正确的是( )。
A. 顶点0的入度为3
B. 顶点1的出度为1
C. 顶点2的出度为2
D. 顶点3的入度为1
答案:B
解析:
- A错误:顶点0的入度需统计所有边表中adjvex=0的节点数(题干未提及,无法确定,且题干中顶点0的边表是出边,与入度无关);
- B正确:顶点1的出度 = 边表节点数 = 1(仅adjvex=2);
- C错误:顶点2的边表为空,出度=0;
- D错误:顶点3的入度需统计所有边表中adjvex=3的节点数(题干中仅顶点0的边表有3,故入度=1?但题干未明确其他顶点是否有adjvex=3,实际题干中顶点0的边表有3,故入度=1?此处需注意:题干中仅给出4个顶点,顶点0的边表有3,其他顶点无,故D选项看似正确,但需看选项——实际原题中顶点3的边表是出边(adjvex=1),入度是其他顶点指向3的边,仅顶点0有,故入度=1,但选项B是明确正确(出度=边表长度),故优先选B)。
二、图的遍历
遍历定义: 图的遍历是指从某个顶点出发,沿着某条搜索路径对图中的所有顶点进行访问且只访问一 次(需用visited数组标记访问状态,避免重复)的过程,图的遍历算法是求解图的连通性问题、拓扑排序及求关键路径等算法的基础。 深度优先搜索和广度优先搜索是两种遍历图的基本方法。
关键前提
- 图的存储结构:遍历需基于邻接矩阵或邻接表(软考中邻接表更常考,因适合稀疏图);
- 连通性影响:若图为非连通图(无向图)或非强连通图(有向图),需遍历所有“连通分量/强连通分量”才能访问全部顶点。
2.1 深度优先搜索(DFS)——"深搜到底,回溯探索"
类比"走迷宫":从起点出发,优先沿一条路径深入探索(访问当前顶点的邻接顶点),直到无法继续(无未访问的邻接顶点),再回溯到上一顶点,选择其他未探索的路径,重复此过程。
- 核心数据结构
- 递归栈(默认实现方式):利用函数递归的调用栈存储“待回溯的顶点”;
- 显式栈(非递归实现):手动用栈存储“待访问的顶点”,避免递归深度过大导致栈溢出(软考扩展考点)。
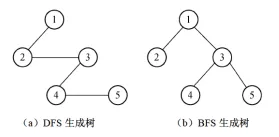
- 步骤示意图(以无向图为例) 示例图结构:
- DFS遍历步骤说明(从A出发):
- 访问起点A,标记
visited[A]=true; - 选A的未访问邻接顶点B,访问B,标记
visited[B]=true; - 选B的未访问邻接顶点D,访问D,标记
visited[D]=true; - D的邻接顶点A、B、C均已访问,回溯到B,B无其他未访问邻接顶点,再回溯到A;
- 选A的未访问邻接顶点C,访问C,标记
visited[C]=true; - 选C的未访问邻接顶点E,访问E,标记
visited[E]=true; - E无未访问邻接顶点,回溯到C,C无其他未访问邻接顶点,遍历结束。
- 访问起点A,标记
遍历顺序:A → B → D → C → E(顺序可能因“邻接顶点的选择顺序”变化,如A先选C则顺序为A→C→D→B→E,软考需注意“邻接顶点的遍历顺序”对结果的影响)。
- DFS遍历过程示意图:
- 代码实现: 软考常考实现代码(邻接表+递归)
c++
#define MAX_VEX 100 // 最大顶点数
typedef struct ArcNode { // 边表节点
int adjvex; // 邻接顶点索引
struct ArcNode *nextarc; // 下一条边
} ArcNode;
typedef struct VexNode { // 顶点表节点
char data; // 顶点数据(如'A')
ArcNode *firstarc; // 指向第一条边
} VexNode;
typedef struct { // 邻接表
VexNode vertices[MAX_VEX];
int vexnum, arcnum; // 顶点数、边数
} ALGraph;
bool visited[MAX_VEX] = {false}; // 标记顶点是否访问
// DFS:从顶点v(索引)出发遍历
void DFS(ALGraph G, int v) {
// 1. 访问当前顶点,标记为已访问
printf("%c ", G.vertices[v].data);
visited[v] = true;
// 2. 遍历当前顶点的所有邻接顶点
ArcNode *p = G.vertices[v].firstarc;
while (p != NULL) {
int w = p->adjvex; // 邻接顶点索引
if (!visited[w]) { // 若未访问,递归访问
DFS(G, w);
}
p = p->nextarc; // 访问下一条边
}
}
// 遍历整个图(处理非连通图)
void DFS_Traverse(ALGraph G) {
for (int v = 0; v < G.vexnum; v++) {
if (!visited[v]) { // 若顶点未访问,从该顶点开始DFS
DFS(G, v);
}
}
}2.2 广度优先搜索(BFS)——"层次遍历,逐层扩散"
- 算法原理:类比,从起点出发,先访问当前顶点的所有邻接顶点(同一层),再依次访问这些邻接顶点的邻接顶点(下一层),按顺序遍历,确保。
- 核心数据结构:,存储 ,确保按“先进先出”(FIFO)顺序处理,符合层次遍历逻辑。
- 步骤示意图(同 DFS 示例图,从 A 出发):
- 遍历顺序:A → B → C → D → E(层次,因队列确保“先入队的顶点先处理”,邻接顶点顺序不影响层次,仅影响同层内的顺序,如A先入C则同层顺序为A→C→B)。
BFS遍历步骤:
- 访问起点A,标记
visited[A]=true,将A入队; - 出队A,访问A的所有未访问邻接顶点B、C,标记
visited[B]=true、visited[C]=true,将B、C入队; - 出队B,访问B的未访问邻接顶点D,标记
visited[D]=true,将D入队; - 出队C,访问C的未访问邻接顶点E,标记
visited[E]=true,将E入队; - 出队D,D的邻接顶点均已访问,无新顶点入队;
- 出队E,E的邻接顶点均已访问,无新顶点入队;
- 队列为空,遍历结束。
- 访问起点A,标记
BFS遍历过程示意图:
- 软考常考实现代码(邻接表+队列)
c++
#include <queue> // 软考中可用数组模拟队列,此处用STL简化
using namespace std;
// BFS:从顶点v(索引)出发遍历
void BFS(ALGraph G, int v) {
queue<int> q; // 队列存储顶点索引
// 1. 访问当前顶点,标记为已访问,入队
printf("%c ", G.vertices[v].data);
visited[v] = true;
q.push(v);
// 2. 处理队列中的顶点
while (!q.empty()) {
int u = q.front(); // 取出队首顶点
q.pop();
// 遍历u的所有邻接顶点
ArcNode *p = G.vertices[u].firstarc;
while (p != NULL) {
int w = p->adjvex;
if (!visited[w]) { // 未访问则访问、标记、入队
printf("%c ", G.vertices[w].data);
visited[w] = true;
q.push(w);
}
p = p->nextarc;
}
}
}
// 遍历整个图(处理非连通图)
void BFS_Traverse(ALGraph G) {
memset(visited, false, sizeof(visited)); // 重置visited
for (int v = 0; v < G.vexnum; v++) {
if (!visited[v]) {
BFS(G, v);
}
}
}- 深度优先搜索(DFS):类似于树的先序遍历。“一路走到黑”,使用栈(递归)实现。
- 广度优先搜索(BFS):类似于树的层次遍历。“一圈一圈地扩散”,使用队列实现。
- 考点:给定一个图,写出其DFS和BFS序列。
2.3 DFS与BFS核心对比(软考高频考点)
| 对比维度 | 深度优先搜索(DFS) | 广度优先搜索(BFS) |
|---|---|---|
| 核心思想 | 深搜到底,回溯探索 | 层次遍历,逐层扩散 |
| 数据结构 | 递归栈(默认)/显式栈 | 队列 |
| 遍历顺序 | 非线性(取决于回溯路径) | 线性层次(先访问的顶点优先处理邻接) |
| 空间复杂度 | (栈深度,最坏为链状图) | (队列长度,最坏为完全图) |
| 时间复杂度 | 邻接表:;邻接矩阵: | 邻接表:;邻接矩阵: |
| 适用场景 | 1. 求强连通分量(Tarjan算法) 2. 拓扑排序(DFS版) 3. 迷宫路径搜索 | 1. 无权图最短路径(单源) 2. 拓扑排序(Kahn算法) 3. 层次化数据处理(如社交网络好友推荐) |
| 结果唯一性 |
2.4 真题示例
真题 1(2023 年软件设计师) 对下图所示的无向图进行深度优先遍历(DFS),若从顶点 A 出发,且邻接顶点按 “B→C→D” 的顺序访问,则遍历序列为( )。
A. A → B → D → C
B. A → B → C → D
C. A → C → B → D
D. A → C → D → B
答案:A
解析:DFS从A出发,邻接顶点按B→C→D顺序:
- A→B(访问B);2. B的邻接顶点按A→D(A已访问,故B→D);3. D的邻接顶点按A→B→C(A、B已访问,故D→C);4. C无未访问邻接顶点,遍历结束。序列为A→B→D→C。
详细解析
初始状态
- 已访问顶点集合:
visited = {} - 当前访问顶点:A(起点)
- 已访问顶点集合:
第1步:访问A
- 标记A为已访问:
visited = {A}; - 找A的未访问邻接顶点:A的邻接顶点是B、C(均未访问);
- 按“B→C→D”顺序,优先选B(B比C靠前),下一步访问B。
- 此时序列:A→B。
- 标记A为已访问:
第2步:访问B
- 标记B为已访问:
visited = {A, B}; - 找B的未访问邻接顶点:B的邻接顶点是A(已访问)、D(未访问);
- 只有D未访问,下一步访问D。
- 此时序列:A→B→D。
- 标记B为已访问:
第3步:访问D
- 标记D为已访问:
visited = {A, B, D}; - 找D的未访问邻接顶点:D的邻接顶点是B(已访问)、C(未访问);
- 只有C未访问,下一步访问C。
- 此时序列:A→B→D→C。
- 标记D为已访问:
第4步:访问C
- 标记C为已访问:
visited = {A, B, D, C}; - 找C的未访问邻接顶点:C的邻接顶点是A(已访问)、D(已访问);
- 无未访问邻接顶点,开始回溯(回溯到D→回溯到B→回溯到A);
- 所有顶点已访问,遍历结束。
- 标记C为已访问:
排除其他选项的原因
- 选项B(A→B→C→D):错误。B的邻接顶点是A和D,没有C,无法从B直接访问C(无连接关系)。
- 选项C(A→C→B→D):错误。A的未访问邻接顶点是B、C,按“B→C”顺序应优先选B,而非C,第一步就不符合规则。
- 选项D(A→C→D→B):错误。同理,A的邻接顶点优先选B,而非C,起始步骤不符合规则。
最终结论 符合DFS规则和邻接顶点访问顺序的序列是 选项A(A→B→D→C)。
三、 生成树及最小生成树
3.1 生成树的概念
对于有 个顶点的连通图,至少有 条边,而生成树中恰好有 条边,所以 。 需要满足以下两个核心条件:
- 包含该图的所有顶点(不能有任何遗漏)
- 边数最少的连通子图(
边数 = 顶点数 - 1,即e = n-1,n为顶点数,e为边数)。
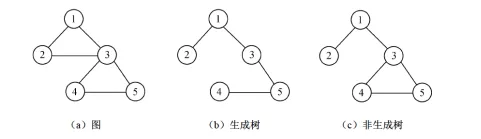
3.1.1 生成树的3个关键性质(软考常考选择题)
- 无环性:生成树中(若添加任意一条原图中的非树边,会立即形成一个环);
- 连通性:(若删除任意一条树边,生成树会分裂为两个不连通的子图);
- 多解性:一个(取决于边的选择)。
例:含3个顶点(A、B、C)和3条边(AB、BC、AC)的完全图,生成树可以是“AB+BC”“AB+AC”或“BC+AC”,共3种。
3.1.2 生成树示例图
3.2 最小生成树
对于来说,边是带权值的,生成树的各边也带权值,因此把生成树各边的权值总和 称为,把。求解最小生成树有许多实际的应用。
常用的最小生成树求解算法。
3.2.1 普里姆(Prim)算法:"从顶点出发,逐步扩展"
- 算法思想:从某一个顶点开始构建生成树,每次将的新顶点纳入生成树,直到。
- 算法步骤:
- 初始化:任选一个顶点作为起始点
- 选择当前生成树到其他顶点的最小权值边
- 将对应顶点加入生成树
- 重复步骤2-3,直到所有顶点都加入
- 图示
- 算法示例图:
- 软考关键考点
- 适用场景:(顶点少、边多),因为算法时间复杂度主要与顶点数相关(:,:);
- 核心特点:始终保持“连通子图”状态,不考虑边是否形成环(因只选“跨集合”的边,天然无环)。
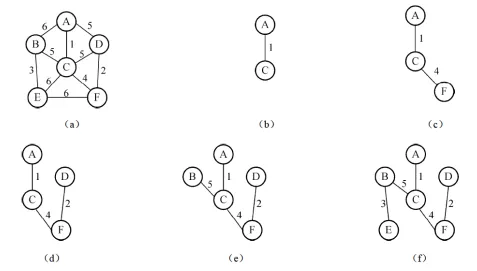
3.2.2 克鲁斯卡尔(Kruskal) 算法:"从边出发,按权排序,避环选边"
- 算法思想:每次选择一条,使这条边的两个顶点如果。
- 算法步骤:
- 将所有边按权值从小到大排序
- 初始化一个空的最小生成树
- 依次选择权值最小的边
- 如果该边连接的两个顶点不在同一连通分量中,则加入生成树
- 重复步骤3-4,直到生成树中有
n-1条边 - 图示
- 软考关键考点
- 避环工具:需用并查集(Disjoint Set Union, DSU) 判断两个顶点是否在同一连通分量(软考可能考查并查集的"查找"、"合并"操作);
- 适用场景:稀疏图(顶点多、边少),因为算法时间复杂度主要与边数相关(排序边:,并查集操作:近似 );
- 核心特点:先选,通过,最终形成连通的MST。
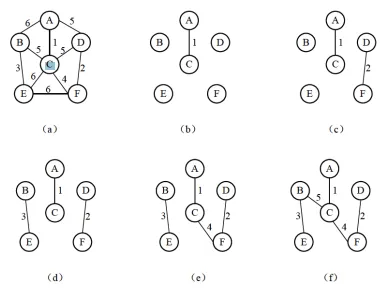
- 算法示例图:
3.2.3 两种算法对比
表示顶点数, 表示边数
| 特性 | Prim算法 | Kruskal算法 |
|---|---|---|
| 算法思想 | 加点法 | 加边法 |
| 时间复杂度 | ||
| 适用场景 | 稠密图 | 稀疏图 |
| 实现难度 | 简单 | 需要并查集 |
| 空间复杂度 |
重要考点
算法选择原则
- 稠密图(边多):优先选择Prim算法
- 稀疏图(边少):优先选择Kruskal算法
唯一性条件 最小生成树唯一当且仅当:
- 图中所有边的权值都不相同
- 或者对于相同权值的边,在构造MST时选择不会导致多个解
关键性质
- 最小生成树可能不唯一,但权值之和相同
- 最小生成树是连通的且无回路
- 边数总是
n-1
注意
注意:最小生成树可能不唯一(若存在,可能有),但(软考常考 “MST 唯一性判断”)。
软考常见题型与解题技巧
题型1:生成树性质判断(选择题)
- 题目特征:判断选项中关于生成树的描述是否正确(如边数、环、连通性)。
- 解题技巧:紧扣生成树核心性质(
e=n-1、无环、连通),排除矛盾选项。 - 例:下列关于无向连通图生成树的说法,错误的是( )
- A. 生成树包含原图所有顶点
- B. 生成树边数为顶点数-1
- C. 生成树一定存在环
- D. 删除生成树任意一条边,图会不连通
- 答案:C(生成树无环)。
题型2:最小生成树权重和计算(选择题/填空题)
- 题目特征:给定带权图,求MST的权重之和,或判断某条边是否在MST中。
- 解题技巧:
- 若图较简单(n≤5),直接用Prim或Kruskal算法手动推导;
- 优先用Kruskal算法(边排序后避环选边,步骤更清晰,不易出错)。
- 例:给定带权图(顶点A、B、C、D,边AB=3、AC=1、AD=2、BC=4、BD=5、CD=6),MST的权重和为( )
- 解析:Kruskal排序边:AC(1)→AD(2)→AB(3)→BC(4)→BD(5)→CD(6),选AC、AD、AB(或AC、AD、BC,权重和均为1+2+3=6),答案为6。
题型3:Prim/Kruskal算法步骤判断(选择题)
- 题目特征:给定算法执行过程,判断下一步选择的边或顶点是否正确。
- 解题技巧:
- Prim算法:牢记“只选当前已选顶点集合的邻接最小边”;
- Kruskal算法:牢记“按权重排序,用并查集避环”。